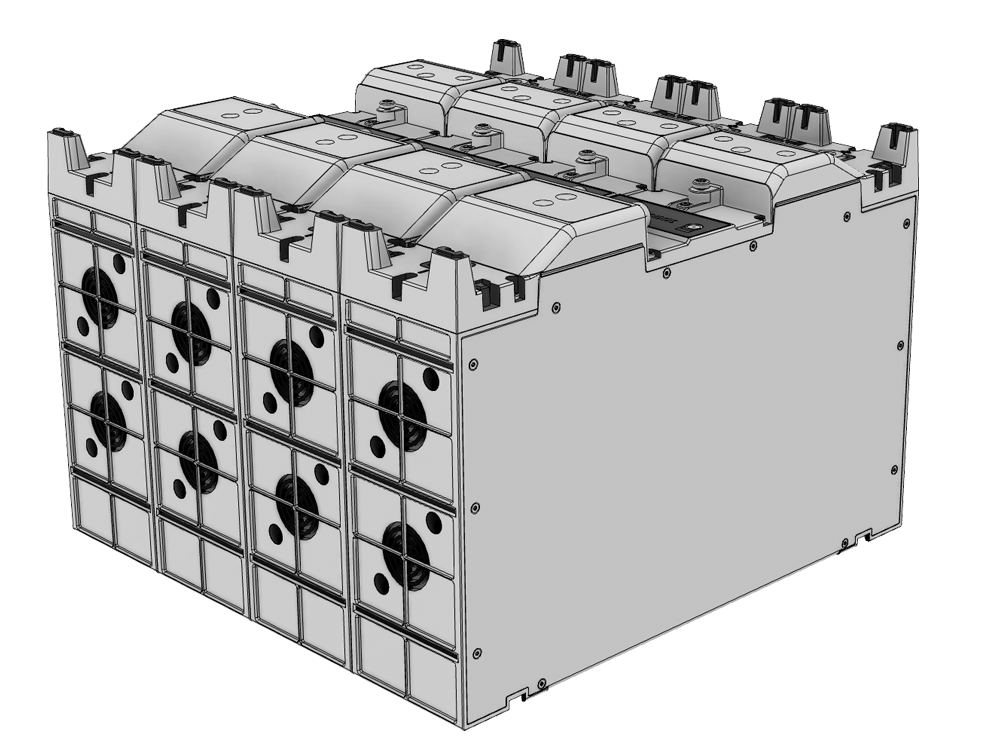
Oma tuotteemme, C-350, on kätevän kokoinen mobiilirobotti kantokyvyltään aina 350 kg asti.
Robotti voidaan varustaa monenlaisilla erilaisilla lisätarvikkeilla, kuten laatikostoilla, nostomekanismeilla, käsirobotilla, ja niin edelleen. Lisävarusteet voidaan virroittaa robotin omasta akustoista (5, 12V tai 24V ulostulot).
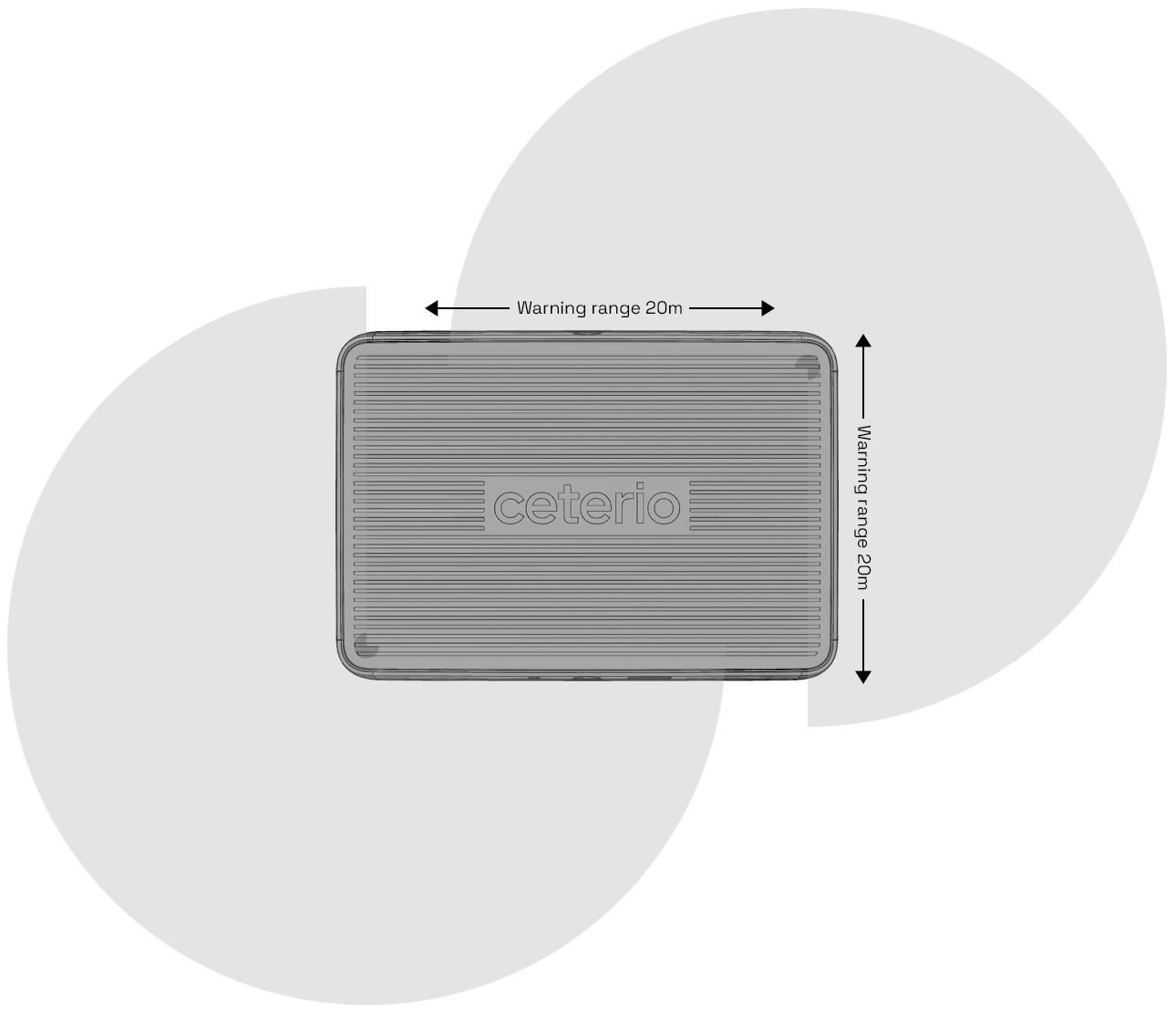
Navigaatioratkaisumme käyttää luonnollisen tilan muotoja paikannukseen, eikä tarvitse käytettävään tilaan erillisiä markkereita ja on testattu hankalissa teollisisssa ympäristöissä.