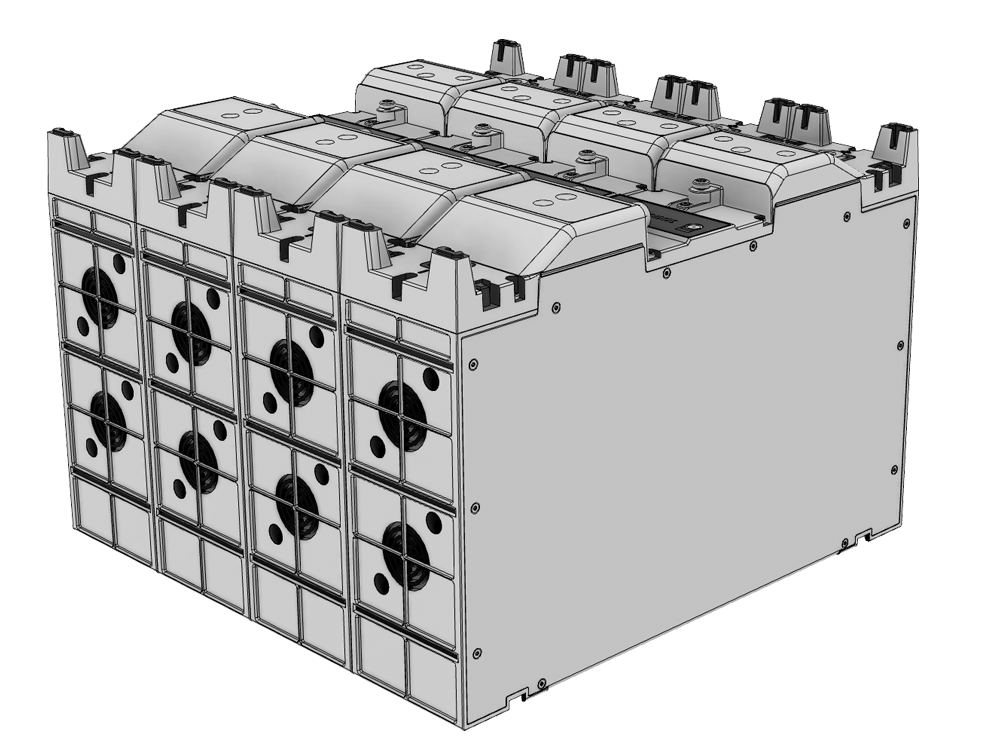
Our C-350 is a compact-size AMR capable of carrying loads up to 350 kilograms.
AMR can be equipped with other required components like for example cabinets, cobots, lift mechanisms, etc. Any additional components can be powered from the C-350 battery (outputs available 5V, 12V and 24V).
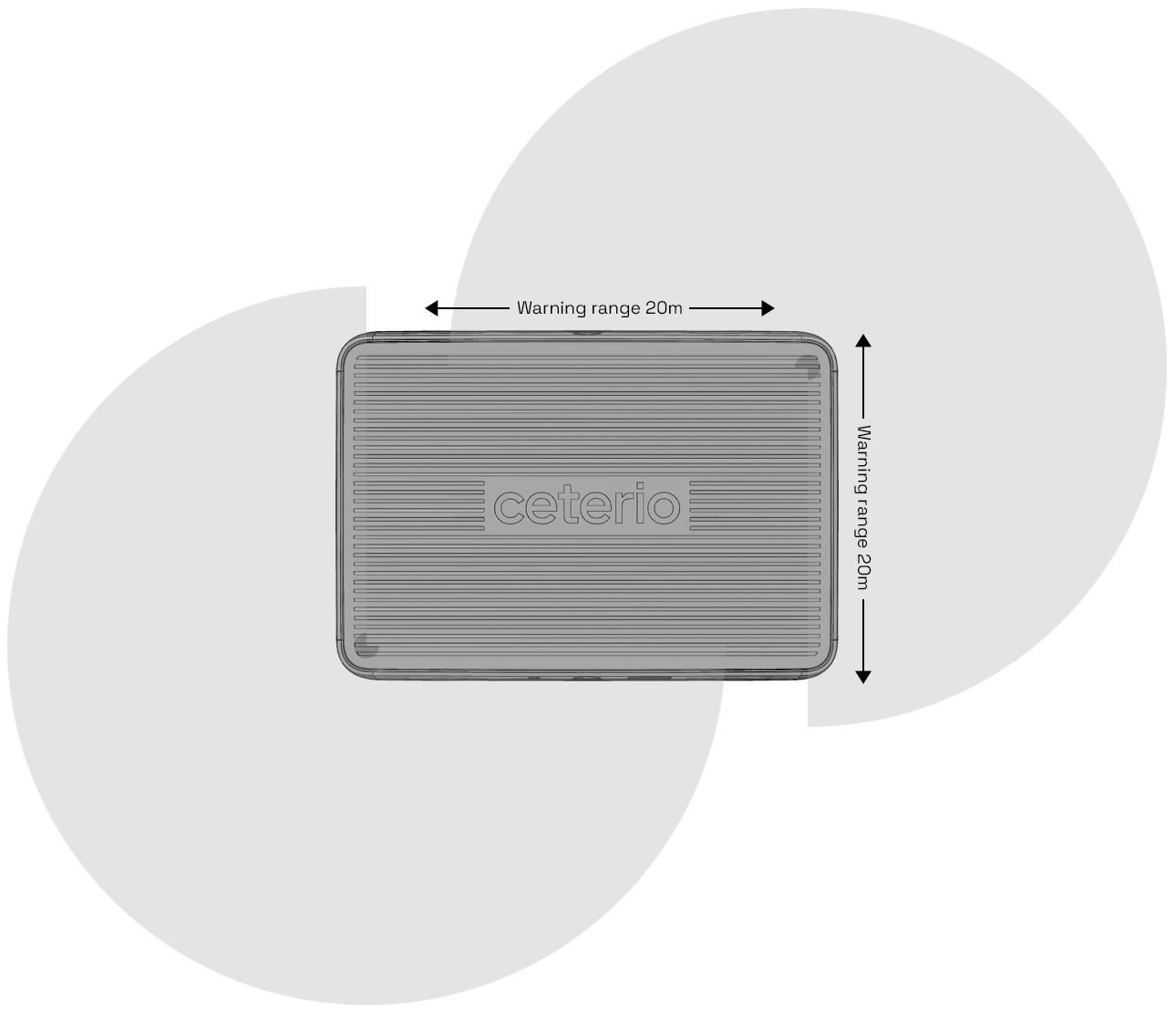
Our navigation solution uses natural environment features, does not require additional markers and is proof tested in industrial conditions.